YakeBot
Sistema Robótico YakeBot
O primeiro robô autónomo de cirurgia oral do mundo

Sistema de cirurgia oral Yakebot
A atualização da nova geração redefine a cirurgia robótica!

Alcance Cirúrgico Melhorado
O sistema de braço robótico foi actualizado, melhorando a precisão de posicionamento do equipamento e aumentando significativamente a precisão cirúrgica. Permite a realização de procedimentos cirúrgicos ao nível submilimétrico, tornando possíveis casos de elevada complexidade e cirurgias minimamente invasivas, e alargando de forma significativa o âmbito das aplicações clínicas.

Acesso directo a partir de todos os ângulos
A adição de sensores de binário e de força nas articulações do braço robótico permite um controlo mais fino durante a operação, tornando os movimentos mais sensíveis e suaves. Esta melhoria aumenta a flexibilidade, reduz a fadiga do operador e encurta significativamente a curva de aprendizagem, permitindo que um maior número de médicos adquira rapidamente as competências necessárias para a sua utilização.
Design com ângulo ajustável e estrutura de desacoplamento rápido, permitindo a alternância, em qualquer momento, entre baixa e alta velocidade, bem como a mudança do modo de navegação do robô. É compatível com uma gama mais alargada de procedimentos cirúrgicos clínicos.

Controlo portátil através de ecrã táctil sem fios
Os ecrãs tácteis sem fios tornam os procedimentos cirúrgicos mais práticos e optimizam a utilização do espaço disponível.
Microcirurgia Endodôntica
Cirurgia Oral e Maxilofacial
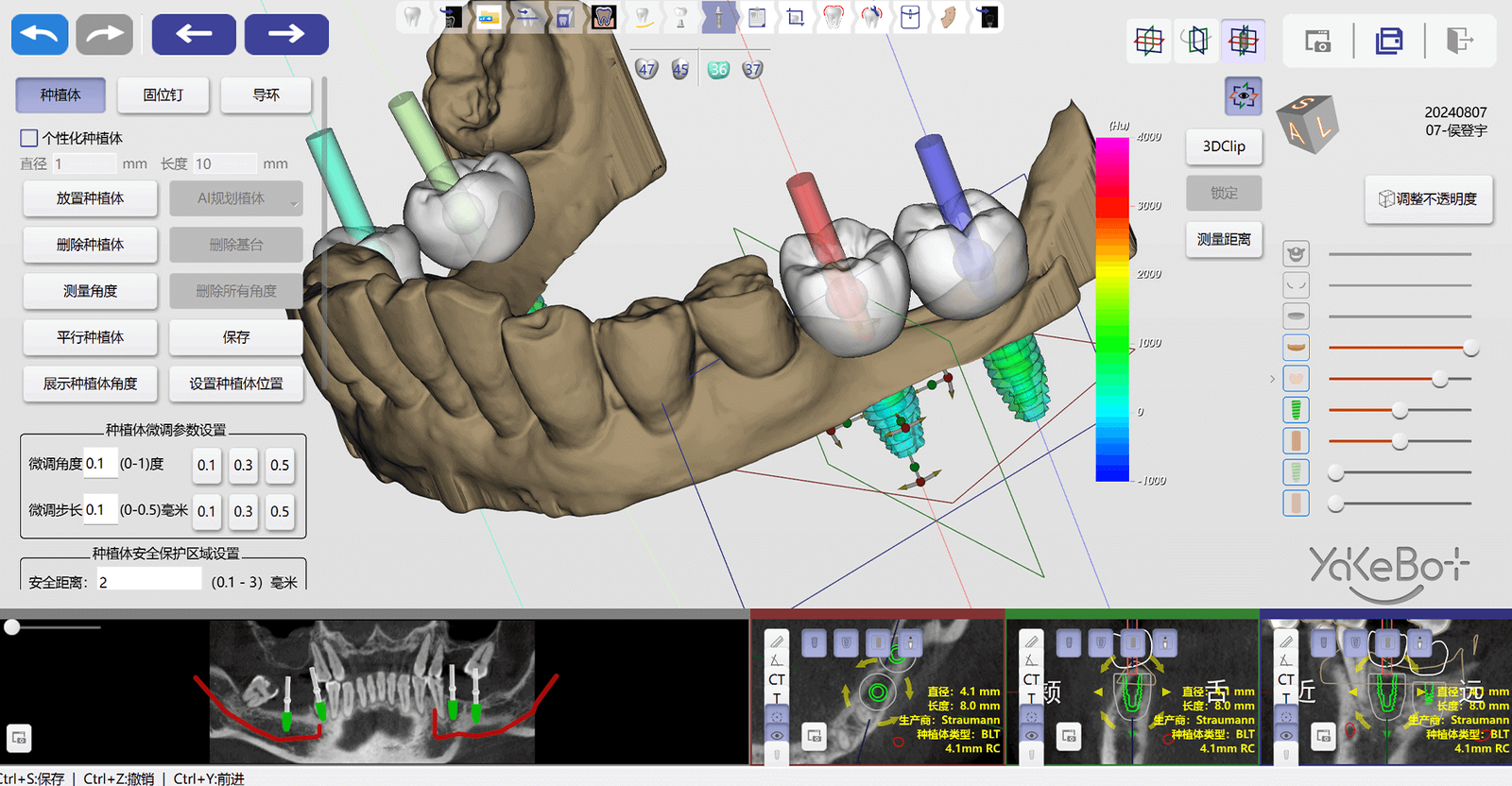
Implantologia de arcada completa
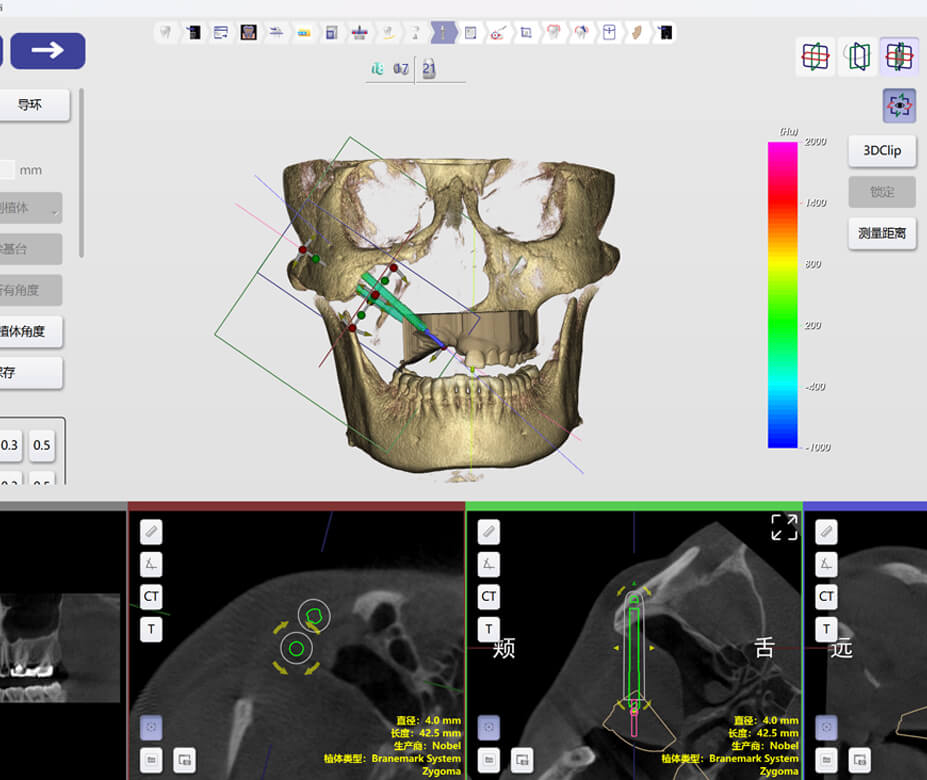
Implantologia Zigomática
Operação simples
Expansão flexível

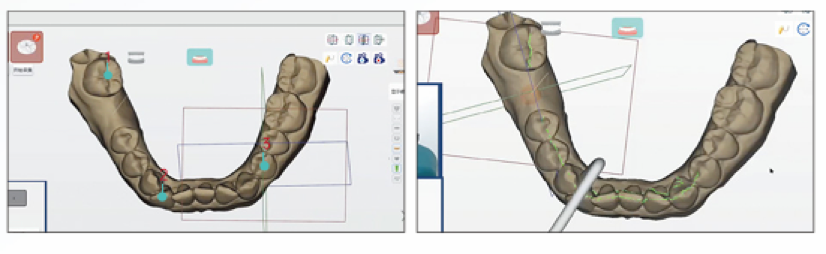
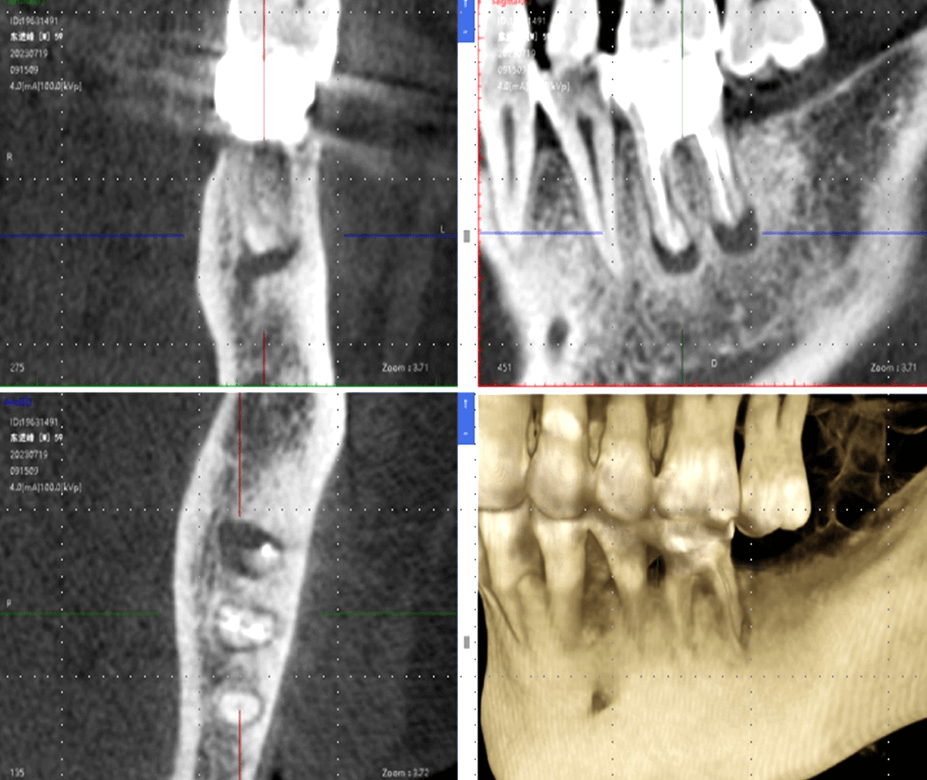
CBCT inicial + digitalização intraoral
Adaptação a diferentes dados de CBCT e digitalização intraoral; tratamento numa única visita, planeamento imediato; cirurgia no mesmo dia / prótese no mesmo dia
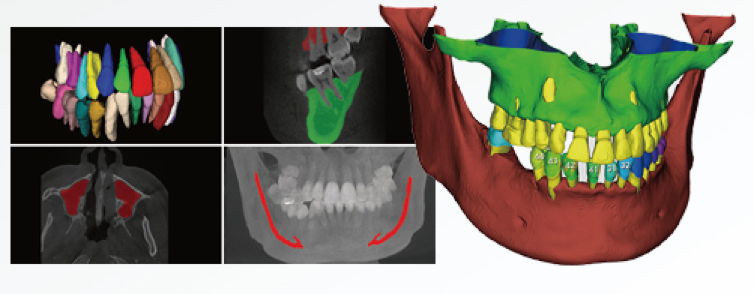
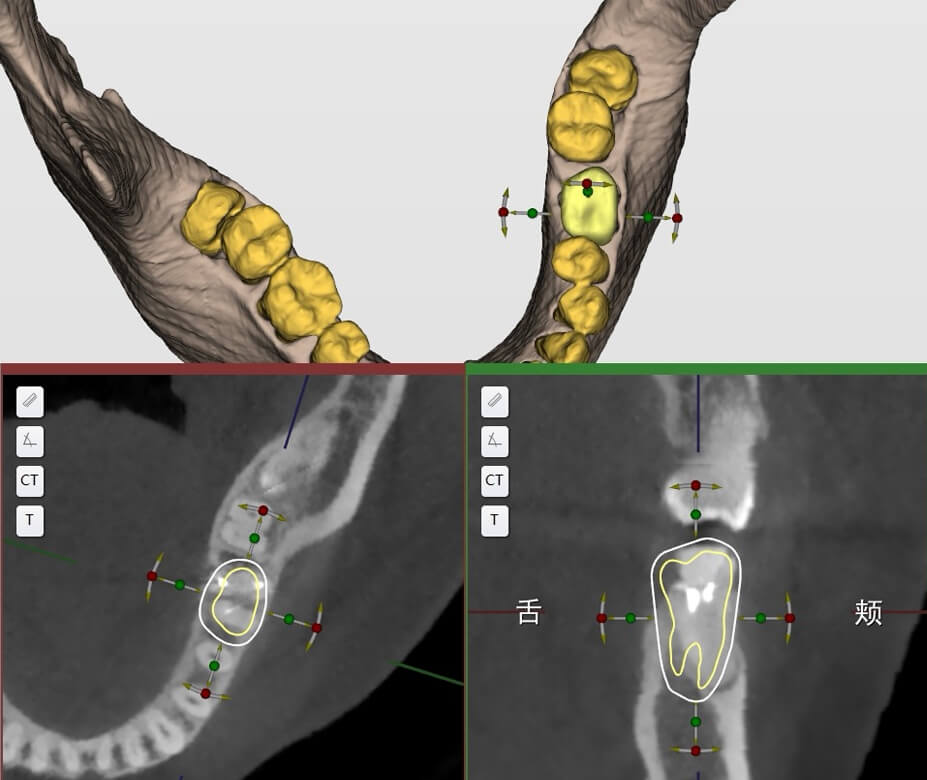
Exportação com um clique das principais estruturas anatómicas dentárias
Segmentação Inteligente Automática;
Extração Rápida de Informação sobre a Posição Dentária
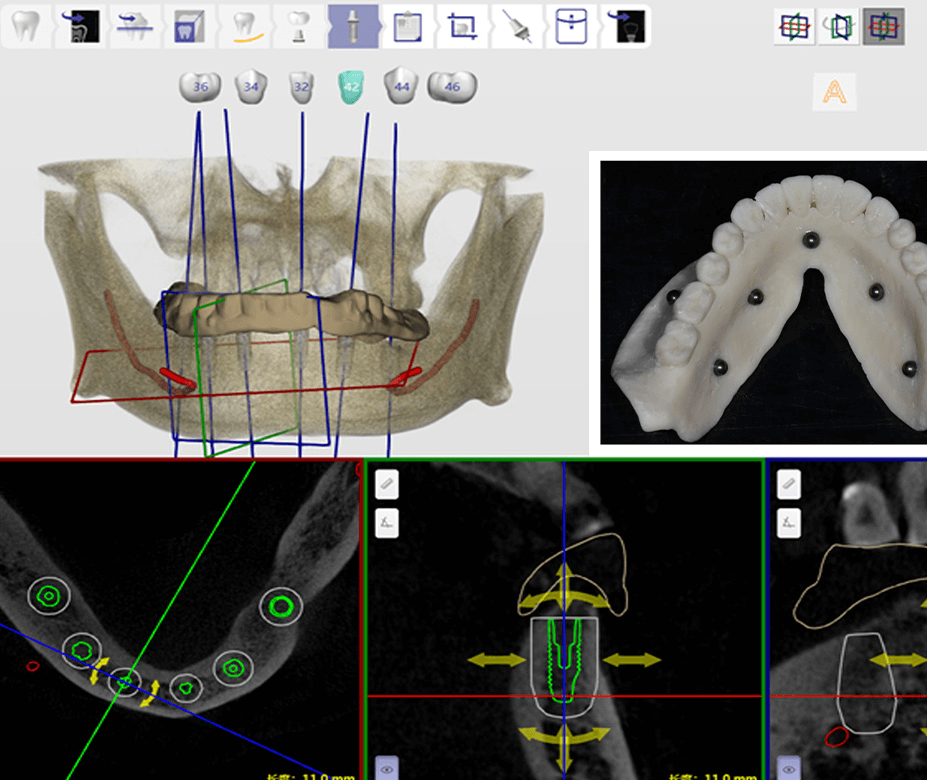
Registo Secundário de Pontos e Nuvem
Integração precisa entre modelos virtuais e estruturas reais